改善活動・からくり改善
注目記事
改善アイキャッチバック-scaled.png)
改善事例セレクト「記事一覧」
2026.06.23
日本プラントメンテナンス協会が開催した「優秀改善事例全国大会2025」&「クイーンズカンファレンス」から17事例を記事として紹介しており、本ページはその一覧となります。
せつびさんとカンリさんの「モノづくり品質の基本のキ」#16 良い仕事をするための基本~その14 「問題解決」⑤
2026.07.15
せつびさん(以下せ):カンリさん、アタラシさん、こんにちわ! 前回は、問題解決型の手順4の「対策の検討」と手順5、「対策の実施」を説明しましたね。

からくり改善のための「機構学」入門 No.16 機構の解析(その7:GeoGebraでカムのシミュレーション1)
2026.07.17
前回まで、瞬間中心を活用して、リンク機構の速度の関係を求める手法について、GeoGebraを利用することで、条件を変えても動的に追従できるモデルが定義でき、便利に解析が行えることを紹介してきました。 振り返れば、GeoGebraを用いた機構の解析については、今回で7回目を迎えます。これまでリンク機構ばかりを扱ってきましたが、GeoGebraで解析できる対象は、それだけではありません。今回は趣向を変えて、カム機構の動作をGeoGebraでモデル化する方法について説明してみたいと思います。
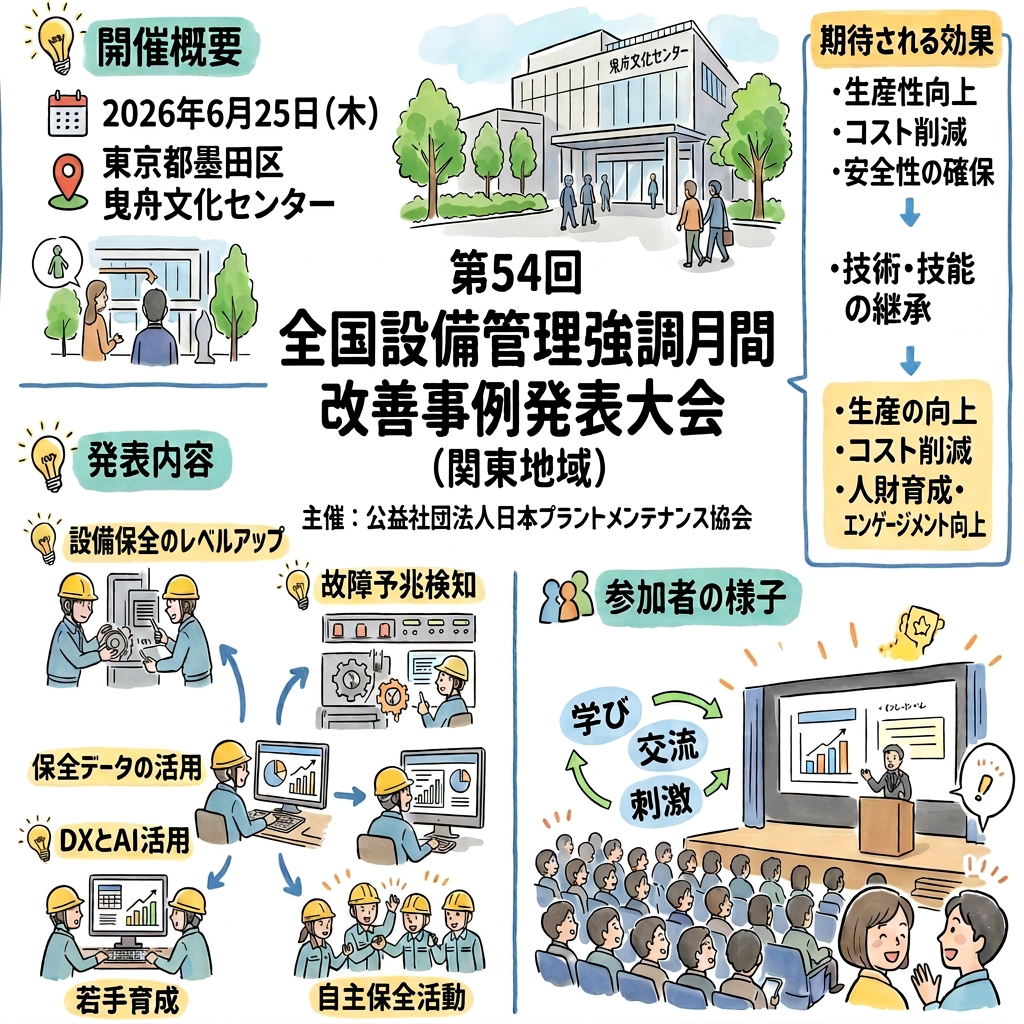
目からウロコのスゴすぎ改善「第54回 全国設備管理強調月間 改善事例発表大会(関東地域)」開催レポート
2026.07.29
2026年6月25日(木)、東京都墨田区の曳舟文化センターにて、公益社団法人日本プラントメンテナンス協会主催の「第54回 全国設備管理強調月間 改善事例発表大会(関東地域)」が開催されました。
記事一覧
目からウロコのスゴすぎ改善「第54回 全国設備管理強調月間 改善事例発表大会(関東地域)」開催レポート
2026.07.29 FREE
からくり改善のための「機構学」入門 No.16 機構の解析(その7:GeoGebraでカムのシミュレーション1)
2026.07.17
せつびさんとカンリさんの「モノづくり品質の基本のキ」#16 良い仕事をするための基本~その14 「問題解決」⑤
2026.07.15
改善事例セレクト「記事一覧」
2026.06.23 FREE
せつびさんとカンリさんの「モノづくり品質の基本のキ」#15 良い仕事をするための基本~その13 「問題解決」④
2026.06.18
企業の垣根を越えたコラボ改善活動 ~輪が繋がる 広がる EJ(トヨタ自動車東日本)とTY(トヨタ車体)の良いとこ取りチャレンジ~
2026.06.17
からくり改善のための「機構学」入門 No.15 機構の解析(その6:GeoGebraで求める機構の速度2)
2026.06.12
女性活躍推進に向けた組織的取組みとその効果に関する考察
2026.06.10
みんなで無くす『もったいない』 ~省エネ診断は設備の健康診断~
2026.06.03
アルミ給湯機湯量変動対策による品質安定化 ~設計的弱点の克服~
2026.06.03
油圧ホース破裂ゼロを目指して ジャスト イン タイム
2026.05.26
からくり改善のための「機構学」入門 No.14 機構の解析(その5:GeoGebraで求める機構の速度)
2026.05.15